回転リミッタ
主軸は可変抵抗器に接続するため、機械的な回転を制限するリミッタ機構がついています。このため、連続回転することはできません。
DC小型サーボ
DCサーボは指定位置まで回転する機構です。ステッピングモータではなく、DCモータと角度検出器(通常可変抵抗)と制御回路から構成されます。
サーボ動作
サーボの主軸には、下側の可変抵抗器と連結しています。回転角度に応じた電圧と、DCサーバの要求回転角との誤差により、DCサーボは正/逆に回転します。
制御回路
制御回路と可変抵抗の接続が不明のばあい、制御回路をはずして、外部からの電源をモータに直結します。
これでも、DCモータと減速機構が利用できます。この場合、逆転回路は外付けにする必要があります。
リミット機構
しかし、回転制限機構はサーボモータにより異なり、主軸の回転と可変抵抗器の回転を切り離さないものもあります。
この場合、可変抵抗器からの接続線を切り、3本の信号の間に同じ抵抗をつけます。
連続回転
サーボは原則機構付DCモータになっています。この回転制限機構を除去すると、中央より右/左 の指示を出すだけで指定方向に連続回転します。
参考
もう少し詳しい説明がこちらにあります(英文です)。
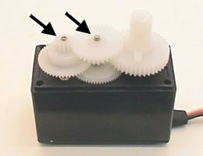
DCサーボの構造
DCサーボの上部にはモータを減速する歯車があります。左下にモータがあり、中央下の歯車に連結します。
これが左の歯車、中央上の歯車、右の歯車(主軸)に連結します。
軸受け
上図の矢印は回転軸で、サーボの上蓋で固定されます。主軸は蓋の穴から突き出て、外日のサーボホーンを回転します。