組み合わせた座標変換
原点以外の点Pでの回転を行うには、
点Pから原点に移動:To
原点で回転;Tr
点Pに戻す:Tp
の各変換行列を作成し、
Tp Tr To P
で変換します。(Tp Tr To)をあらかじめ計算しておけば、点P 以外の変換処理は、1回の行列計算で可能です。
基本変換
スケール(拡大・縮小)、原点周りの回転、移動、まどの基本変換を組み合わて、一般の変換を行うことができます。
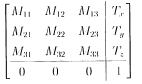
移動を含む変換行列
移動を含めて、変換行列を利用するには、4*4 の変換行列にします。Mは3*3の変換行列で、Tx,Ty,Tz が移動距離です。座標は(px,py,pz,1)に拡大します。
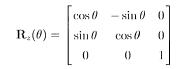
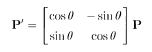
回転
2次元で、原点周りに点Pを角θすには、次の変換を利用します。

スケール
点Pをx,y,z方向に a,b,c倍 に変換するスケール変換を行います。
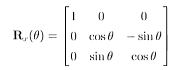
3次元の場合これはZ軸周りの回転変換となります。

どうように、x,y 軸周りの回転変換行列は次のようになります。