栚揑
丂嫍棧僙儞僒傪棙梡偟偰丄忈奞暔傑偱偺嫍棧傪應掕偟傑偡丅偙偺弌椡偼傾僫儘僌怣崋側偺偱丄偙偺怣崋儗儀儖傪挷愡偟PIC88偺AD曄姺婡擻傪棙梡偟偰僨傿僕僞儖曄姺偟丄偙傟傪LED偱昞帵偟傑偡丅
嫍棧僙儞僒乕
-
嫍棧僙儞僒乕
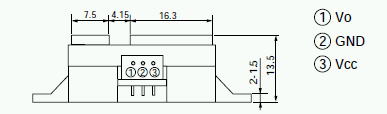
嫍棧僙儞僒乕偵偼丄GP2D12傪棙梡偟傑偡丅偙傟偼丄愒奜慄傪棙梡偟丄懳徾暔傑偱偺嫍棧傪應掕偟傑偡丅應掕斖埻偼5-80cm偱丄80cm埲忋偺墦嫍棧偺應掕偼崲擄偱偡丅壓恾侾僺儞偑傾僫儘僌弌椡偱丄2僺儞傪僌儔儞僪丄俁僺儞傪俆V偵愙懕偟傑偡丅揹尮偺愙懕傪娫堘偊側偄傛偆丄拲堄偟偰偔偩偝偄丅
丂偙偺嫍棧僙儞僒乕偐傜偺怣崋偼丄2.5V埲壓偱偡偐傜墘嶼憹暆婍傪梡偄偰2攞偵憹暆偡傞昁梫偑偁傝傑偡丅

-
摿惈
丂嫍棧偵懳偡傞弌椡揹埑偺僌儔僼偆偂帵偟傑偡丅嫍棧偲嫟偵弌椡揹埑偑尭彮偟傑偡偑丄10cm埲壓偵側傞偲丄嵞傃揹埑偑尭彮偡傞偨傔拲堄偑昁梫偱偡丅傑偨丄25cm埲忋偱偼揹埑偺曄壔偑彮側偔側傝傑偡丅傑偨丄寁應帪娫傕 40mS 掱搙昁梫偱偡偐傜丄偙傟埲壓偺帪娫偱撉傒庢傝傪偟偰傕堄枴偼偁傝傑偣傫丅
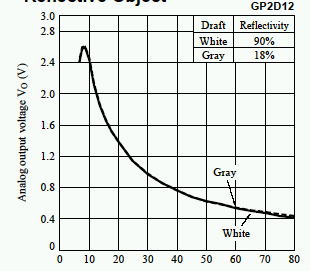
http://www.sharp.co.jp/products/device/lineup/data/pdf/datasheet/gp2d12_j.pdf 傛傝 -
揹婥揑摿惈
丂揹埑報壛屻丄弌椡偑埨掕偡傞傑偱丄30mS掱搙昁梫偱偡丅徚旓揹棳偼 50mA 偱敿摫懱晹昳偲偟偰偼揹椡偑昁梫偱偡丅
僆儁傾儞僾夞楬
丂-
怣崋憹暆
僆儁傾儞僾偼怣崋傪憹暆偟偨傝丄捈愙愙懕傪偡傞偲怣崋儗儀儖偑曄壔偟偰偟傑偆傾僫儘僌怣崋傪庴偗庢傝埨掕側弌椡傪嫙媼偡傞栚揑偱巊梡偝傟傑偡丅僆儁傾儞僾偵傕懡偔偺庬椶偑偁傝傑偡偑丄崅偄廃攇悢乮100KHz埲忋乯丄崅搙側埨掕惈丄戝偒側弌椡丄側偳偑昁梫偱側偄応崌丄乽斈梡宆乿偺僆儁傾儞僾側傜壗偱傕棙梡偱偒傑偡丅
-
憹暆夞楬
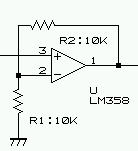
丂僆儁傾儞僾偼丄亇椉嬌惈偺怣崋傪埖偆応崌丄亇偺揹尮偑昁梫偱偡偑丄偙偙偱偼丄擖椡揹埑偼 亄 偱偡偐傜丄扨揹尮梡偺僆儁傾儞僾偑棙梡偱偒傑偡丅偙偙偱偼丄LM358 傪棙梡偟傑偡丅
丂僆儁傾儞僾偺憹暆搙偼奜晅偗偺掞峈偱掕傑傝傑偡丅壓偺夞楬偼乽旕斀揮憹暆夞楬乿偱憹暆棪偼擇偮偺掞峈R2,R1傛傝丄1+ R2/R1偱掕傑傝傑偡丅R2=R1 偺応崌憹暆搙偼俀偵側傝傑偡丅
幚尡夞楬
丂-
PIC侾俇F88
丂PIC16F88偼PIC16F648偺婡擻偵壛偊偰丄AD曄姺婡擻偑慻傒崬傑傟偰偄傑偡丅億乕僩A懁偺抂巕偼傾僫儘僌抂巕偲嫟捠偱偡偺偱丄傾僫儘僌偲僨傿僕僞儖偺愗傝懼偊偑昁梫偱偡丅
丂
俹俬俠侾俇俥俉俉偼撪晹敪怳夞楬偑慻傒崬傑傟偰偄傞偺偱丄偙傟傪棙梡偟傑偡丅
徻嵶偼丄PIC擖栧偺乽傾僫儘僌張棟乿傪嶲徠偟偰偔偩偝偄丅
偙偙偱偼丄16F88偵敪怳巕傪愙懕偟傑偡丅僙儔儈僢僋敪怳巕偺拞墰偺僺儞傪僌儔儞僪丄椉懁偺僺儞傪PIC偺15,16僺儞乮OC1,OC2乯偵愙懕偟傑偡丅 -
夞楬
嵍偺3僺儞偺僐僱僋僞偵嫍棧僙儞僒乕傪愙懕偟傑偡丅嫍棧僙儞僒乕傪慜曽忋偐傜尒偨応崌丄岦偐偭偰嵍偑侾僺儞乮怣崋乯偵側傝傑偡丅俀僺儞偼僌儔儞僪丄俁僺儞偼VCC乮俆V乯偵愙懕偟傑偡丅
丂偙偺怣崋傪斈梡偺OP傾儞僾 LM358 偱2攞偵憹暆偟傑偡丅LM俁俆俉偺4僺儞偵僌儔儞僪丄俉僺儞偵VCC乮俆V乯偺揹尮傪愙懕偟傑偡丅
PIC16F88偵偼傾僫儘僌擖椡偺嵟戝揹埑傪帺恎偺嶲徠揹埑敪惗婡擻偱曄峏偱偒傑偡偑丄偙偙偱偼丄懠偺墳梡傪峫偊偰丄OP傾儞僾傪棙梡偟傑偡丅棙梡偟偰偄傞OP乮偍傌乯傾儞僾偼丄乽扨堦揹尮懳墳乿宆側傜壗偱傕峔偄傑偣傫丅
偙偺恾偼16F88傪棙梡偟偰偄傑偡偑丄16F873偱傕摨條偱偡丅岝僙儞僒乕偺崁傪嶲徠偟偰偔偩偝偄丅
僾儘僌儔儉
-
C尵岅偺応崌
A0抂巕傪傾僫儘僌擖椡偲偟偰棙梡偡傞偵偼丄
丂setup_adc_ports(sAN0);
偱愝掕偟傑偡丅傑偨丄AD僐儞僶乕僞梡偺僋儘僢僋傪巜掕偡傞偨傔丄偙偙偱偼丄
丂setup_adc(ADC_CLOCK_DIV_32);
傪峴偄傑偡丅
丂傾僫儘僌怣崋偼丄A0丄..丄A3 傑偱偺4杮偺怣崋傪愗傝懼偊偰慖戰壜擻偱偡丅A0丄..丄A3 偺怣崋偼侽偐傜係偺僠儍儞僱儖偵懳墳偟傑偡丅0僠儍儞僱儖偵愝掕偡傞偲丄A0抂巕偺怣崋傪撉傒庢傝傑偡丅
丂set_adc_channel(0)
偱僠儍儞僱儖傪愝掕偟丄
丂value=read_adc();
偱傾僫儘僌怣崋傪丄10bit偺僨傿僕僞儖怣崋偲偟偰撉傒崬傓偙偲偱偒傑偡丅AD僐儞僶乕僞偐傜偺怣崋偼10bit偱偡偐傜丄偙偺怣崋傪庴偗庢傞偵偼丄 long 宆乮16bit乯偺曄悢偑昁梫偱偡丅偙偙偱偼丄AD曄姺偟偨抣傪係偱妱偭偰8bit偵曄姺偟丄寢壥傪LED偱昞帵偟偰偄傑偡丅
PIC偵侾俇F873乮儅僀僋儘儘乕僟乯傪梡偄傞応崌丄#include #fuses 傪僐儊儞僩偟偨傕偺偲岎姺偟偰偔偩偝偄丅//RA0丗傾僫儘僌擖椡 //RB0:丂僨傿僕僞儖弌椡 #include <16f88.h> //#include <16f873A.h> #fuses HS,NOWDT,NOLVP,NOMCLR //WDT,LVP側偟 //#fuses HS,NOWDT,NOLVP //16F873偺応崌丂 #use delay(CLOCK=20000000) #byte port_b = 6 long value; int vu8,vl2; void main() { set_tris_b(0x0); setup_adc_ports(sAN0); setup_adc(ADC_CLOCK_DIV_32); while(1){ set_adc_channel(0); delay_us(60); value=read_adc(); vu8 = value/4; port_b = vu8; delay_ms(200); } }
壽戣
-
旕捈慄惈
丂偙偺僙儞僒乕偺弌椡偼嫍棧偵斾椺偟偰偄傑偣傫丅嫍棧偲僒儞僒乕弌椡偺僌儔僼傪嶌惉偟丄偙傟傪愜傟慄嬤帡偟偰丄嫍棧偵斾椺偡傞弌椡傪弌偡傛偆側僾儘僌儔儉傪嶌惉偟偰偔偩偝偄丅
-
昞帵
悢帤昞帵傗僶乕LED偺昞帵傪帋偟偰偔偩偝偄丅
-
壒偺弌椡
丂嫍棧偵傛傝壒偺崅偝偑曄傢傞僾儘僌儔儉傪嶌惉偟丄娙堈乽僥儖儈儞乿傕偳偒傪嶌惉偟偰偔偩偝偄丅