DCモータ
-
小型DCモータ
ここでは、小型のDCモータの回転制御を行います。小型DCモータは玩具にもよ良く利用されています。ここで利用するモータは適正電圧1.5V〜3V、電流数百mA程度です。
DCモータは負荷がない場合(回転軸に何も接続されていない場合)、電流は少ないですが非常に高回転になり、軸やブラシを傷めます。また、負荷が重すぎる場合回転数が落ち、高い電流が流れます。電流が適正値を越えると、発熱して故障の原因になります。 -
DCモータの特性
モータの回転力は通常トルク(g/cm)であらわします。標準の回転数のときのトルクを適正負荷といいます。数では、標準回転数は約2000(rpm)、トルクは120g程度です。回転数の単位rpmは分あたりの回転数です。モータの回転数は高いので、通常、ギヤ(歯車)で回転数を落として使用します。回転数を 1/100 にすると、トルクは100倍になります。回転数*トルク が仕事量になります。ギヤなどの損失を無視すれば、モータに流し込む電流がモータの仕事量になります。仕事量が同じであれば、回転数が半分になればトルクは倍になります。

(図は http://www.picfun.com/motorframe.html より) -
モータの制御
モータに流れる電流は電圧が一定であれば、回転数で定まり外部から制御することは困難です。電圧をかえると、直線的にトルクが増し、回転数も増加しますが、流れる電流が多い場合電圧の制御は簡単ではありません。
そこで、PWM: Pulse Width Modulation 制御がよく利用されます。
この方法は、一定区間の中で通電する割合(時間幅)を変更して平均的な電力を調整する方法です。下図は、25%、50%、75% の電力制御の説明図です。横方向が時間で、立ち上がっている間スイッチをオンにして通電します。
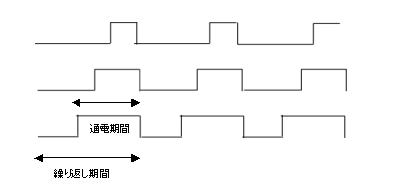
通電幅を0にすればオフ、繰り返し期間と通電期間を同じにすれば、完全オン状態になります。PWM制御は少々荒っぽい手法なので、制御可能な対象は限定されますが モータの電力制御にはよく利用されます。
-
PICのPWM制御
PIC873にはPWM信号を生成する機能が2回路あります。ただし、全体の周期は2回路とも同じです。まず、setup_ccp1(CCP_PWM); で、ccp1 機能を PWM に設定します。2回路のPWMが必要なら setup_ccp2 も設定します。
setup_ccp1(CCP_PWM);
setup_ccp2(CCP_PWM);
次に、タイマー2の周期を設定します。タイマー2はPWMの全体の周期を設定します。 タイマー2の元になるクロックは、PIC 本体のクロックの 1/4 の周波数です(周期は周波数の逆数です)。これを、さらに、1/prd にしてPWMの周期とします。これは、ccp1とccp2に共通です。prdは 255 以下とする必要があります
setup_timer_2(T2_DIV_BY_4,prd,1);
周期の中のパルスの幅(これを duty といいます)を定まるには、set_pwm1_duty(pwt) を利用します。pwt が1周期内部のパルス幅を定めます。これは、周期より小さな値に設定する必要があります。このパルス幅は、ccw1とccw2で異なる値にすることができます。
set_pwm1_duty(pwt1);
set_pwm2_duty(pwt2);
ccw1のpwm信号は、c2/ccp1 端子(13ピン)から、ccw2のpwm信号は、c1/ccp2 端子(12ピン)から取り出すことができます。
回路設計
-
回路図

プログラム
-
ソース
//DC Motor 制御 //PWM 制御 #include <16F873A.h> #fuses HS,NOWDT,NOLVP,NOPROTECT #use delay(clock = 20000000) #use RS232(BAUD=9600,xmit=PIN_C6,rcv=PIN_C7) int i; int prd; int div; void main(){ //ポートA入力 set_tris_a(0xFF); //ポートB4bit出力 set_tris_b(0xF0); //RB3にPWM信号生成 setup_ccp1(CCP_PWM); setup_ccp2(CCP_PWM); //タイマー2の周期を約0.1mSに設定 prd=40; setup_timer_2(T2_DIV_BY_4,prd,1); prd -= 2; while(1){ //パルス幅でモータをPWM制御する div=0; for(i=0;i<4;i++){ set_pwm1_duty(prd-div); set_pwm2_duty(prd-div); output_b(~i); div += 2; //1000m秒周期 delay_ms(3000); } } }
モータの回転方向制御
-
Hブリッジ回路
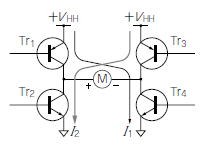
DCモータの回転方向の制御には、Hブリッジと呼ばれる回路構造が利用されます。下図でTr1とTr4をオンにすれば、M(モータ)には左から右に電流が流れます。Tr3とTr2をオンにすれば、逆方向に電流が流れます。
-
モジュール
Hブリッジを構成するのは少々面倒ですから、図のようなモジュール TA7192P を利用します。VCは制御用の電源(5V)で、VrefとVSはモータ用の電源です。GND は共通になっています。
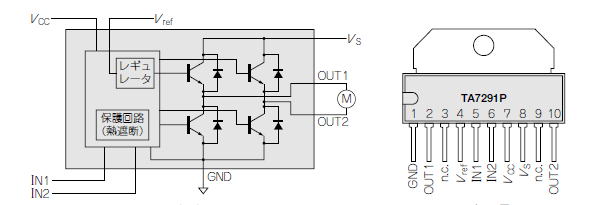
IN1,IN2 が制御端子で、(H,L)で時計回り、(L,H ) で版時計回りに回転します。(L,L) の場合、モータの電流が流れません。(H,H) の場合、M のコイルを短絡することで、M の発電機能を利用したブレーキ機能が利用できます。この、ドライバはVrefの電圧で、モータへの供給電力を制御できます。左右の車輪を独立に制御する場合、回転数を調整することができます。可変抵抗を利用して、Vref に0〜Vsまでの電圧をかけます。

このトランジスタの飽和電圧は1Vくらいあります。したがって、モータの両側で、2V近い電圧の低下があります。低い電圧で動作したい場合、注意が必要です。小型DCモータ(DC3V)の場合、乾電池2本では動作しません。乾電池3本か、Nicd電池4本が適当な電源になります。
また、TA7291P本体も4.5V以上の電圧が必要です。モータと同じ電源を利用すると誤動作の原因になります。乾電池4本か、DC3Vかた、DC-DCコンバータで5Vまでステップアップして利用します。