- 7素子数字表示素子
7素子表示は、電卓などでおなじみの数字表示器です。棒状の発光体を7本を 日 の字型に組み合せ、適当に点滅させると、0から9の数字を表示することができます。下の図は5と9を表示した例です。5では、a,c,d,f,g の素子を点灯します。
点灯する場合を 1 とし g,f, .., c,b,a の順に表記すると、 0 のパタンを点灯するには 0111111 、1の場合は 0000110 となります。
- 発光パターン
表示したい数字に対し、a,..,g の各素子の発光パターンを決めるにはどうしたらよいでしょうか?ここで、プログラムの出番です。まず、以下の配列パターンを用意します。各データは、16進定数で指定されています。
int segment_data[] = {0x7E, 0x0C, 0xB6, 0x9E, 0xCC, 0xDA, 0xFA, 0xE, 0xFE, 0xCE};
16進定数は、4ビットの2進数に対し、0,1,2、.. 、7,8,9、A,B,C,D,E,F の文字を対応させます。
16進数 0 1 2 3 4 5 6 7 8 9 A B C D E F 2進数 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111
16進文字が2文字で、8ビットの2進数を表現できます。たとえば、0xB6 は 1101 0110 に相当します。最下位の0を無視すると、1101 011 は 数字 2 を表示するパターンです。したがって、
segment_data[2]
は数字 2 を表示するパターンとなります。一般に、segment_data[i] は数字 i のパターンを表示します。ここで、配列の最後(第0)のビットを無視したのは、PIC のBポート の B1、..,B7 に 7素子表示の a,..,g を接続するからです。B0 は特殊な目的に利用できますから、ここでは、この端子を使用しないで空けておきます。
segment_data[2]
をポートBに送ると、最後(第0)ビットは7素子表示器にはおくられず、第1から第7ビットが segment_data[2] に送られ数字の"2"を表示します。
- 3桁の動的表示
先に1桁の数字表示を紹介しましたが、この方法で3桁を表示すると、1桁当たり7本の信号が必要ですから、3*7本の接続が必要になってしまいます。動的表示を利用すると、7本+3本で3桁の表示が可能になります。
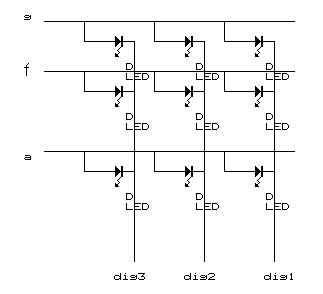
- C-533SR
C-533SRは 7素子表示素子が3個内臓されています。ここでは、まず、1桁の表示のみを行い、次の項で3桁の表示法を紹介します。
横線が、a,..,g の各素子に接続されます。各7素子は共通に接続されており、dig3,dig2,dig1の各信号線をGND(0V)に接続すると対応する7素子が発光します。例えば、dig1 の端子をグランド(0V)に接続し、b,c の端子に抵抗を通して電源5Vを接続すれば、1桁に”1”が発光します。
- 手法
先に利用した C533SR は数字を表示する7素子の端子以外に、桁を指定する dig3,dig2,dig1の信号線があります。この信号をGND(0V)に接続すると対応する桁の7素子が発光します。 dig3,dig2,dig1 の信号を切替えながら、7素子に各桁の値を設定して、「動的」に表示を行うことができます。
しかし、 dig3,dig2,dig1 の信号を直接PICに接続するには無理があります。その理由は、dig3/2/1 の端子には、7素子の電源のオン/オフを行うため、最大、1素子の7倍の電流(LED当たり10mAの場合、計70mA)が流れ、これはPICのポート出力の許容値(20mA)を超えるためです。
この問題の対策として、トランジスタを利用します。
- トランジスタスイッチ
PICの出力は20mA程度の電流しか流せません。したがって、7素子の桁信号(dig2,1)を切替えることはできません。トランジスタをスイッチとして利用すると、100mA〜1A 程度の電流をスイッチできます。
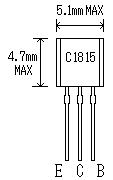
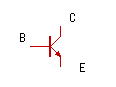
下図はここで用いるトランジスタ C1815 の正面図です。左から、E:エミッタ端子、C:コレクタ端子、B:ベース 端子の順です。B端子からE端子に数mAの電流を流すと、C端子からE端子に約百mAの電流を流すことができます。下図右側はトランジスタの記号で、左がB(ベース)端子、右上がC(コレクタ)端子、右下がE(エミッタ)端子になります。
PICも同じ半導体(トランジスタ)から構成されていますが、PICの出力端子のトランジスタは面積が小さいのであまり電流を流せないのです。トランジスタ C1815 は大きな面積がありますから、PICより大きな電流を流すことができます。
下図は、PICの端子を抵抗を通してB端子に接続しています。PICの端子はHレベルになると、トランジスタのB端子からE端子に電流が流れます。すると、C端子からE端子のその数十倍(最大100mA)までの電流を流すことができます。PICの端子がLレベルになると、トランジスタのB端子に電流がながれないため、C-E 端子にも電流が流れません。
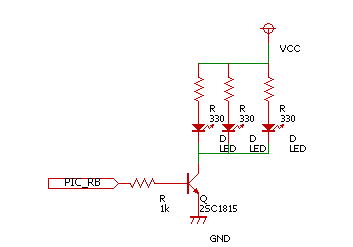
ここでは、7素子表示器の切替え信号 dig1 をトランジスタのC端子に接続します。PICの桁の切替え信号をトランジスタのベースに抵抗を挟んで接続します。
- 回路図(参考)
3桁を表示する回路構成は次のようになります。
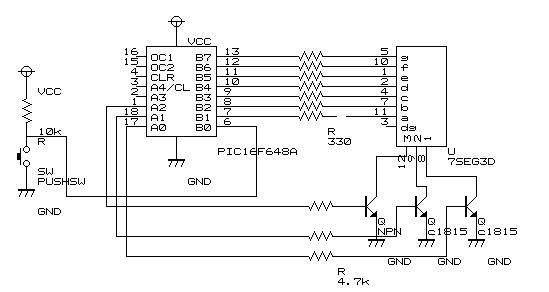
- プログラム(参考)
3桁を表示するプログラムです。各桁の値を配列st[]に計算し、st[] の値を順に切り替えながら表示しています、
#include <16f648a.h> #include <stdlib.h> #fuses INTRC_IO,NOWDT,NOLVP,NOMCLR//内部クロック、WDT,LVPなし #use delay(CLOCK=4000000) //クロック4MHz //PB7..PB1に7素子のg..aを接続 //PA2,PA1,PA0に7素子の桁信号を接続 //5mS単位で各桁を表示 //20回表示したら、表示する数値を更新する int ct;//数字の更新間隔 long val;//表示する数字 int digit;//表示する桁 //表示パターン int segment_data[]={0x7E,0x0C,0xB6,0x9E,0xCC,0xDA,0xFA,0xE,0xFE,0xCE}; char st[3]; void main(){ digit=0; ct=1;//数字を更新する周期 val=0;//表示する値 while(1){ ct --; if(ct == 0){//数字の更新 st[2]=val/100; st[1]=val/10-st[2]*10; st[0]=val%10;//10の余り val++; if(val==1000) val=0; ct=20; } if(digit== 2){//第3桁の表示 output_b( segment_data[st[2]]); output_bit(PIN_A2,1);//3桁表示開始 delay_ms (5); //表示期間(ミリ秒) output_bit(PIN_A2,0);//表示を消す delay_us(100); } if(digit== 1){ output_b( segment_data[st[1]]); output_bit(PIN_A1,1); delay_ms (5); output_bit(PIN_A1,0); delay_us(100); } if(digit == 0){ output_b( segment_data[st[0]]); output_bit(PIN_A0,1); delay_ms (5); output_bit(PIN_A0,0); delay_us(100); } digit ++;//表示桁を変更 if(digit ==3 ) digit=0; } }
- 光センサー
光センサーは光の強さにより、抵抗値が変わる物質(CdS:硫化カドミウム)を利用しています。光が殆どないときは、数十Kオームの高抵抗ですが、、室内照明程度の明るさで、数Kオームまで抵抗が低下します。
このcdsの抵抗変化を電圧として取り出し、PICのAD変換機能を利用すると、光センサーからの電圧により、出力の制御を行うことができます。
- センサー回路
図で楕円で囲まれた抵抗の記号がCdS光センサです。CDSの面への明るさが変わると、図の出力端子の電圧が変化します。
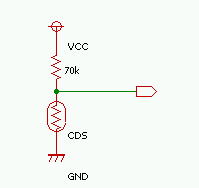
テスターでcdsの面を室内光をあてた場合と、指で塞いだ場合の抵抗を測定してください。次に、図のように70kΩ程度の抵抗を直列に接続し、5Vの電圧をかけたときの出力電圧を測定してください。
CDSの抵抗を r kΩ(Ω) としたとき、 出力電圧は 5 * ( r / ( r + 70) ) となることを確認してください。
- アナログ信号
1,0 の2値でなく、電圧値などの物理量がそのまま値となるような信号をアナログ信号といいます。アナログ信号を入力として、それを、ディジタル値に変換する機能を A/D (アナログディジタル)変換といいます。PICの 16F88 にはこのAD変換機能が組み込まれています。
AD変換を行うには、アナログ信号を入力する端子と使用するクロックを指定します。
setup_adc_ports(AN0);//A0端子をアナログ入力AN0として利用する
setup_adc(ADC_clock_div_32);//クロックは内部クロックの1/32
16F88は4本のアナログ信号端子があります。まず、まず set_adc_channel(0) で読み込む端子(チャンネル)を指定し、少し時間を置いてから read_adc() で変換値を読み込みます。読み込む値は10bitですから、変数は long で宣言します。
long vd;//16ビット整数
set_adc_channel(0);//0チャンネルを選択
delay_us(30);//変換時間待つ
vd=read_adc();//変換結果を読む
- AD変換を利用する場合の注意
PICでAD変換機能を利用する場合、PICの電源として十分安定化した電源を利用する必要があります。簡単なDCアダプタの場合、AD変換の出力が10以上ばらつきます。電源に、30μF程度のコンデンサを入れるとばらつきは5程度に抑えられます。良い電源がない場合、3端子の定電圧(安定化)素子を利用すると効果的です。この場合、ACアダプタは9V〜12Vを利用します。
- 小型DCモータ
ここでは、小型のDCモータの回転制御を行います。小型DCモータは玩具にもよ良く利用されています。ここで利用するモータは適正電圧1.5V〜3V、電流数百mA程度です。
DCモータは負荷がない場合(回転軸に何も接続されていない場合)、電流は少ないですが非常に高回転になり、軸やブラシを傷めます。また、負荷が重すぎる場合回転数が落ち、高い電流が流れます。電流が適正値を越えると、発熱して故障の原因になります。

- DCモータの特性
DCモータの回転力は通常トルク(g/cm)であらわします。標準の回転数のときのトルクを適正負荷といいます。ここで利用するモータは、標準回転数は約2000(rpm)、トルクは120g程度です。回転数の単位rpmは分あたりの回転数です。モータの回転数は高いので、通常、ギヤ(歯車)で回転数を落として使用します。回転数を 1/100 にすると、トルクは100倍になります。回転数*トルク が仕事量になります。ギヤなどの損失を無視すれば、モータに流し込む電流がモータの仕事量になります。仕事量が同じであれば、回転数が半分になればトルクは倍になります。
- モータの制御
モータに流れる電流は電圧が一定であれば、回転数で定まり外部から制御することは困難です。電圧をかえると、直線的にトルクが増し、回転数も増加しますが、流れる電流が多い場合電圧の制御は簡単ではありません。
そこで、PWM: Pulse Width Modulation 制御がよく利用されます。
この方法は、一定区間の中で通電する割合(時間幅)を変更して平均的な電力を調整する方法です。下図は、25%、50%、75% の電力制御の説明図です。横方向が時間で、立ち上がっている間スイッチをオンにして通電します。
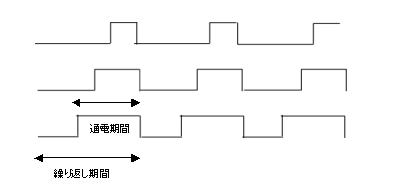
通電幅を0にすればオフ、繰り返し期間と通電期間を同じにすれば、完全オン状態になります。PWM制御は少々荒っぽい手法なので、制御可能な対象は限定されますが モータの電力制御にはよく利用されます。
- PICのPWM制御
PIC88にはPWM信号を生成する機能があります。まず、setup_ccp1(CCP_PWM); で、ccp1 機能を PWM に設定します。
setup_ccp1(CCP_PWM);
次に、タイマー2の周期を設定します。タイマー2はPWMの全体の周期を設定します。 タイマー2の元になるクロックは、PIC 本体のクロックの 1/4 の周波数です(周期は周波数の逆数です)。これを、さらに、1/prd にしてPWMの周期とします。これは、ccp1とccp2に共通です。prdは 255 以下とする必要があります
setup_timer_2(T2_DIV_BY_1,prd,1);
周期の中のパルスの幅(これを duty といいます)を定まるには、set_pwm1_duty(pwt) を利用します。pwt が1周期内部のパルス幅を定めます。これは、周期より小さな値に設定する必要があります。
set_pwm1_duty(pwt1);
ccw1のpwm信号は、B0/ccp1 端子(6ピン)から、から取り出すことができます。
- 出力回路
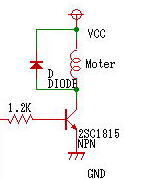
DCモータは小型でも100mA、大きなものでは100A以上の電流を必要とします。オン/オフの制御の場合はリレーを利用しますが、細かい制御が必要な場合、トランジスタを用いた電流増幅を行います。基本は IID で紹介した回路ですが、モーターなど、大きな磁力を発生する回路には、特別な配慮が必要です。
磁力を発生する回路(インダクタンス負荷)は、同じ状態を保とうとする性質があり、電流を流そうとするときと電流を切る場合に反撥します。ここでの問題は電流を切る場合で、発生する反撥(起電)力で、半導体が壊れてしまいます。そこで、反撥する起電力を吸収するため、図のようにコイルに並列にダイオードを接続し、この反撥起電圧を吸収します。

- 目的
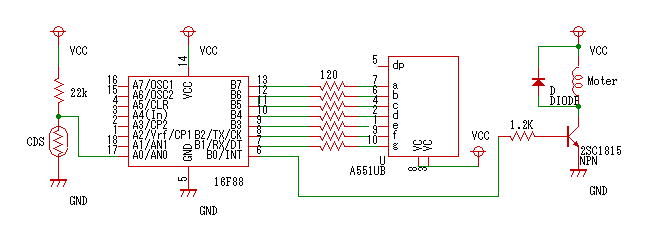
cdsで検知した明るさにしたがい、7素子表示で10段階のレベル表示を行い、パルス幅制御で小型DCモータの回転制御を行います。 - 回路図
CdSセンサーを抵抗と直列に接続し、明るさに応じた電圧を取り出します。これを、PIC(16F88)のアナログ入力(AN0)に接続します。PICのBポートの上位7本を 7セグLED に接続し1桁の数字表示を行います。16F88 のPWM(CCP1)を抵抗を通してトランジスタ(2SC1815)のベースに接続します。トランジスタのコレクタに小型モータを接続します。モータの端子には ダイオード を接続し モータ の電流切断時に発生する逆起電力を吸収します。
- プログラム
先頭の #include <16f88.h> は16F88 の定数を取り込みます。#device ADC=10 は AD変換 を10ビットで読み込む指定です。#fuses はプログラムでは設定できない 16F88 の動作モードを指定します。NOBROWNOUT は電圧低下に伴うリセットを停止する機能で、電池駆動では必要です。use delay(CLOCK=4000000) は内部クロックの周波数です。
segment_data[] は、0〜9 までの数字に対応する発光パターンです。ここでは、B7を7セグの a 端子に接続したため、左右が逆転したパターンになります。
main() 関数では、先頭で set_tris_a(0xFF); でAポートを入力とし、setup_adc_ports(sAN0); でA0端子をアナログ入力として利用し、setup_adc(ADC_clock_div_32); でAD 変換のクロックを設定し、set_adc_channel(0); でアナログ入力を 0チャンネル(AN0)とすることを指定します。
次は、出力側の設定で、set_tris_b(0x01); でPB0以外を出力とすること、output_b(0xFF); でBポートの初期値を1にすること、setup_ccp1(CCP_PWM); でPWM を利用することを指定します。PWM は PB0 から出力されます。次に繰り返しの値を100とし、setup_timer_2(T2_DIV_BY_1,prd,1); でPWMの繰り返し周期を指定します。
この場合、PWMの基本クラックは1μ秒ですから、繰り返し周期は 100μ秒(10KHz)となります。
#include <16f88.h> #device ADC=10 #fuses INTRC_IO,NOWDT,NOLVP,NOMCLR,NOBROWNOUT//内部クロック、WDT,LVPなし #use delay(CLOCK=4000000) //クロック4MHz int prd; int vd,vs; //int segment_data[]={0x7E,0x0C,0xB6,0x9E,0xCC,0xDA,0xFA,0xE,0xFE,0xCE}; int segment_data[]={0xFC,0x60,0xDA,0xF2,0x66,0xB6,0xBE,0xE0,0xFE,0xE6}; void main(){ //ポートA入力 set_tris_a(0xFF); setup_adc_ports(sAN0); setup_adc(ADC_clock_div_32); set_adc_channel(0); set_tris_b(0x01); //ポートB7bit出力 output_b(0xFF); setup_ccp1(CCP_PWM); //RB0にPWM信号生成 //タイマー2の周期を設定 //内部クロック 、最後の1は割り込み間隔 prd=100; setup_timer_2(T2_DIV_BY_1,prd,1);//pwm周期設定:100u while(1){ vd = read_adc()/20; //明るさを取得、 if(vd > prd/2 ) vd = prd/2;// vs = vd/3;//表示する値 0..9 if(vs>9) vs=9; output_b(~segment_data[vs]);//7セグ出力 set_pwm1_duty(prd-(int)vd);//pwmの幅設定 delay_ms(100); } }
while() から繰り返しになります。まず、read_adc() でCdSからの明るさ信号をAD変換しこの値の1/20 を vd とします。vdお が prd/2 を超える場合は vd を prd/2 とします。この値を 1/3 すると、0〜9 の値になります。これを vs として、7セグ 素子に表示します。7セグ は端子を0 にすると発光しますから、~segment_data[vs] と 先頭に ~ で0,1 を反転します。
set_pwm1_duty(prd-(int)vd) で、パルさの幅を vd だけ短くします。vd が大きいと、PWM の1となる幅が短くなるため、モータの回転が弱くなります。
delay_ms(100); は100m秒休止することを指示します。
プレゼンテーション資料がここにあります。