僔儕傾儖儊儌儕偺峔惉
-
昁梫惈
儈僪儖儗儞僕偺PIC摍偱偼丄撪晹偺儊儌儕偼懡偔偰傕1KB掱搙偱丄戝検偺僨乕僞傪婰榐偱偒傑偣傫丅戝検偺婰壇偑昁梫側応崌奜晅偗偺儊儌儕傪巊梡偟傑偡偑丄暋悢偺傾僪儗僗傗僨乕僞慄傪昁梫偲偡傞儊儌儕偼捈愙愙懕弌棃傑偣傫丅偦偙偱丄僋儘僢僋怣崋偲憃曽岦偺僨乕僞怣崋偺2杮偩偗偱丄撉傒彂偒傪峴偆僔儕傾儖愙懕偺僼儔僢僔儏儊儌儕偑傛偔棙梡偝傟傑偡丅
丂僼儔僢僔儏儊儌儕偼丄揹尮傪愗偭偰傕婰壇傪曐帩壜擻偱丄彂偒崬傒偵偼悢倣S偺帪娫偑昁梫偱偡丅撉傒弌偟偼楢懕傾僪儗僗偺応崌丄懕偗偰撉傒弌偟壜擻偱偡偐傜丄僋儘僢僋偺1/10掱搙偺懍搙偱撉傒弌偟壜擻偱偡丅儔儞僟儉側傾僋僙僗偵偼丄傾僪儗僗巜掕摍偑昁梫側偨傔丄楢懕偺応崌偺4攞偺傾僋僙僗帪娫偑昁梫偱偡丅
-
僔儕傾儖儊儌儕巇條
丂偙偙偱徯夘偡傞僔儕傾儖儊儌儕偼僼儔僢僔儏儊儌儕偱丄彂偒崬傒傪偡傞偲揹尮傪愗偭偰傕抣傪曐帩偱偒傑偡丅彂偒崬傒偺曐徹夞悢偼丄侾侽枩夞偐傜侾侽侽枩夞偲側偭偰偄傑偡丅僶僀僩扨埵傑偨偼64僶僀僩扨埵偱偺彂崬傒偑壜擻偱偡丅
丂埲壓偵ATMEL幮偺 AT24C僔儕乕僘偺儊儌儕傪徯夘偟傑偡丅宆 梕検 彂崬傒懍搙 嵟戝僋儘僢僋 揹埑 24LC128 128kbits 5ms 400kHz 2.5-5.5V 24LC256 256kbits 5ms 400kHz 2.5-5.5V 24C1024 1024kbits 5ms 400kHz 2.5-5.5V 徻嵶偼丂http://www.atmel.com/dyn/resources/prod_documents/doc0670.pdf 傪偛棗壓偝偄丅
-
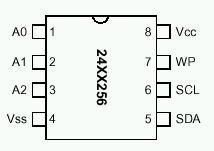
峔惉
A0,A1,A2偼僠僢僾傾僪儗僗偱丄傾僋僙僗帪偵巜掕偟偨傾僪儗僗偺僠僢僾偺傒偑墳摎偟傑偡丅偙偺怣崋傪揔摉偵愝掕偡傞偙偲偱丄俉屄偺儊儌儕傪暲楍愙懕偡傞偙偲偑偱偒傑偡丅偨偩偟丄24C1024偼A1偺傒偑巜掕壜擻偱偡偐傜丄嵟戝2屄傑偱偟偐愙懕偱偒傑偣傫丅
丂SCL偑僋儘僢僋丄SDA偑僨乕僞怣崋偱偡丅僔儕傾儖怣崋偼I2C僞僀僾偱偡丅WP偼WriteProtect偱彂偒崬傒曐岇偵棙梡偟傑偡丅WP偑 H(1) 偺偲偒彂偒崬傒偱偒傑偣傫丅偙偺抂巕偼愙懕偟側偄偲偒L(0)偵惉傝傑偡偑丄嶨壒懳嶔偺堄枴偱偼丄H丄傑偨偼丄L偵愙懕偡傞昁梫偑偁傝傑偡丅
愙懕朄乮I2C乯
-
I2C偵傛傞愙懕
丂I俀C偼婎斅撪偺抁嫍棧偱偺愙懕傪栚揑偲偟偨丄斈梡偺僔儕傾儖愙懕偱偡丅SDA偲SCL偺2杮偺怣崋傪梡偄偰巜掕偟偨傾僪儗僗傊偺彂偒崬傒丄撉傒弌偟傪峴偆偙偲偑偱偒傑偡丅SDA偲SCL偼僶僗怣崋偱丄暋悢偺慺巕傪愙懕偱偒傑偡丅
丂僶僗怣崋傪棙梡偟偰僨乕僞偺撉傒庢傝丄彂偒崬傒傪梫媮峴偆慺巕傪儅僗僞丄儅僗僞偵墳偠偰僨乕僞傪庴偗庢傝丄憲弌傪峴偆慺巕傪僋儔僀傾儞僩偲偄偄傑偡丅偙偙偱偼丄PIC偑儅僗僞丄儊儌儕偑僋儔僀傾儞僩偵側傝傑偡丅
-
僶僗愙懕
PIC偺SDA怣崋偲SCL怣崋傪儊儌儕偺偦傟偲愙懕偟傑偡丅儊儌儕偼偙偺儔僀儞忋偵暋悢愙懕壜擻偱丄A2,A1,A0 偺抂巕偱僠僢僾傾僪儗僗傪愝掕偱偒傑偡丅偙偙偱巊梡偡傞24LC僔儕乕僘偼3杮偺抂巕偱僠僢僾傾僪儗僗傪巜掕偱偒傑偡偐傜丄嵟戝8屄傑偱偙偺儔僀儞忋偵暲楍偵愙懕偱偒傑偡丅
丂PIC懁偱偼丄RB1乮SDA/DT乯偲RB2乮SCL/CK)偵懳墳偡傞怣崋傪丄5倠僆乕儉偺掞峈傪捠偟偰俆V偵愙懕偟傑偡丅崅偄揹埑偱怣崋慄傪捿傝忋偘傑偡偐傜丄偙偺掞峈傪僾儖傾僢僾掞峈偲屇傇偙偲偑偁傝傑偡丅
-
僠僢僾傾僪儗僗
丂I2C偵偼暋悢偺I2C僋儔僀傾儞僩傪愙懕偱偒傑偡丅僋儔僀傾儞僩偼僠僢僾傾僪儗僗偱巜掕偟傑偡丅24LCxx偱偼 A2,A1,A0 抂巕偵僠僢僾傾僪儗僗傪愝掕偟傑偡丅偙偺幚尡偱偼丄愙懕偡傞儊儌儕偼堦偮偩偗偱偡偐傜丄A2,A1,A0 傪偡傋偰僌儔儞僪乮侽V乯偵愙懕偟丄傾僪儗僗傪丂0 偲偟傑偡丅
丂僠僢僾撪晹偺儊儌儕傾僪儗僗偼丄儅僗僞偑僋儔僀傾儞僩偵憲傞僐儅儞僪偱巜掕偟傑偡丅偨偩偟丄24C1042偱偼巜掕偱偒傞僠僢僾傾僪儗僗偼A1偺傒偱偡丅
-
拲堄
丂摨偠 I2C 偺儔僀儞忋偵摨偠僠僢僾傾僪儗僗偺僨僶僀僗偼愙懕偱偒傑偣傫丅RTC偼僠僢僾傾僪儗僗偑 001 屌掕偱偡偐傜丄24C1042偲RTC傪摨帪偵愙懕偡傞応崌丄24C1024偺A1傪侾偵偟偰愙懕偡傞昁梫偑偁傝傑偡丅A1傪0偵偟偰愙懕偡傞偲丄RTC偲24C1024偑徴撍偟傑偡丅
I2C偺傾僋僙僗朄
-
僗僞乕僩丒僗僩僢僾僐儞僨傿僔儑儞
丂SDA偲SCL偼侾偲偟傑偡丅SCL傪1偵偟偨傑傑丄SDA傪1>0偵曄壔偝偣傑偡丅偙傟偑丄僗僞乕僩僐儞僨傿僔儑儞偱偡丅懕偗偰僨乕僞傪憲傝丄嵟屻偺SCL傪侾偵偟偨傑傑丅SDA傪 0>1 偵棫偪忋偘傑偡丅偙傟偑僗僩僢僾僐儞僨傿僔儑儞偱偡丅
-
墳摎
丂1僶僀僩偺僨乕僞彂崬傒屻丄SCL偵僷儖僗傪憲傝傑偡丅偙偺偲偒丄彂崬傒傊偺墳摎偲偟偰儊儌儕偼丂SDA丂傪0偵壓偘傑偡丅偙傟傪墳摎偲尵偄傑偡丅僶僀僩僨乕僞偺彂崬傒屻偼偙偺墳摎傪妋擣偡傞昁梫偑偁傝傑偡丅
-
僶僀僩扨埵彂崬傒庤弴
丂僗僞乕僩僐儞僨傿僔儑儞傪愝掕偟丄師偵丂1010 aaa0丂偺僐儞僩儘乕儖僶僀僩傪弴偵憲傝傑偡丅aaa偼僠僢僾傾僪儗僗偱丄奜晹抂巕偺A2,A1,A0 偵懳墳偟傑偡丅師偵丄傾僪儗僗忋埵丄傾僪儗僗壓埵僶僀僩丄彂崬傒僨乕僞傪憲傝丄嵟屻偵僗僩僢僾僐儞僨傿僔儑儞傪憲傝傑偡丅奺僶僀僩枅偵丂墳摎偺妋擣傪峴偄傑偡丅
丂偨偩偟丄24L1024偺応崌128K僶僀僩偺儊儌儕偑棙梡偱偒傑偡偑丄巜掕偱偒傞傾僪儗僗偼16bit偱偡偐傜64K僶僀僩傑偱偱偡丅64KB傪挻偊傞応崌偼丄僠僢僾傾僪儗僗傪1010 0a10 偲偟傑偡丅偮傑傝丄24L1024 偼512kB偺僠僢僾偑擇偮撪憻偝傟偨儊儌儕偲偟偰埖偆偙偲偵側傝傑偡丅a 偼 奜晹抂巕偺A1偺抣偱掕傑傝傑偡丅
-
64僶僀僩扨埵偺彂崬傒
僗僞乕僩僐儞僨傿僔儑儞傪憲傝丄懕偗偰丂1010 aaa0丂偺僐儞僩儘乕儖僶僀僩傪憲傝傑偡丅aaa偼僠僢僾傾僪儗僗偱偡丅
丂師偵丄愭摢偺傾僪儗僗忋埵丄傾僪儗僗壓埵僶僀僩丄彂崬傒僨乕僞傪64僶僀僩乮埲撪乯懕偗偰憲傝丄嵟屻偵僗僩僢僾僐儞僨傿僔儑儞傪憲傝傑偡丅奺僶僀僩枅偵墳摎怣崋偑曉傝傑偡丅1僶僀僩憲傞偛偲偵儊儌儕偺壓埵傾僪儗僗偼憹壛偟傑偡偑丄忋埵傾僪儗僗偼帺摦憹壛偟傑偣傫丅偟偨偑偭偰丄256僶僀僩偺嫬奅傪傑偨偄偱丄楢懕彂偒崬傒傪偡傞偙偲偼偱偒傑偣傫丅楢懕彂偒崬傒傪偡傞僶僀僩悢傪俀偺傋偒忔偵偡傞偐丄儁乕僕嫬奅傪傑偨偑傞応崌偵2夞偺彂偒崬傒偵暘妱偡傞昁梫偑偁傝傑偡丅儁乕僕嫬奅傪傑偨偄偱彂偒崬傫偩応崌丄摨偠儁乕僕偺愭摢僶僀僩傪彂偒姺偊偰偟傑偄傑偡丅
-
彂偒崬傒懍搙
丂20MHz偺奜晹僋儘僢僋偺侾俇F俉俉傪儅僗僞乕偵偟偰彂偒崬傒傪峴偆偲64僶僀僩偺彂偒崬傒偵丄7.5mS 偑昁梫偱偡乮幚應抣乯丅偦偺屻丄僽儘僢僋偺彂偒崬傒偵俆倣S偺帪娫偑昁梫偱偡偐傜丄崌寁12.5mS偑昁梫偱偡丅5k僒儞僾儖/昩偱64僶僀僩撉傒崬傒帪娫偑12.8mS偱偡偐傜丄偙傟偑16F88偱64僶僀僩扨埵偱僼儔僢僔儏儊儌儕偵彂偒崬傓偲偒偺嵟戝懍搙偵側傝傑偡丅
-
僶僀僩僨乕僞撉傒偩偟
僗僞乕僩僐儞僨傿僔儑儞傪愝掕偟丄懕偗偰丂1010 aaa0丂偺僐儞僩儘乕儖僶僀僩傪憲傝傑偡丅aaa偼僠僢僾傾僪儗僗偱偡丅
丂師偵丄傾僪儗僗忋埵丄傾僪儗僗壓埵僶僀僩丄傪憲傝傑偡丅偙偙傑偱偼丄彂崬傒偲摨偠偱偡丅
丂師偵丂1010aaa1丂偺撉傒弌偟梡僐儞僩儘乕儖僶僀僩傪憲傝傑偡丅丂墳摎傪庴偗庢偭偨傜僨乕僞庴怣傪懸偪傑偡丅僨乕僞傪庴偗庢偭偨傜丂NACK丂傪曉偟丄嵟屻偵僗僩僢僾僐儞僨傿僔儑儞傪憲傝傑偡丅
-
楢懕僨乕僞庴怣
撉傒庢傝奐巒傑偱偼僶僀僩僨乕僞撉傒偩偟偲摨偠偱偡丅僨乕僞傪庴偗庢偭偨偲偒丂ACK丂傪曉偡偲丄師偺僨乕僞傪憲偭偰偒傑偡丅嵟屻偺僨乕僞傪庴偗庢偭偨傜丂NACK丂傪曉偟丄嵟屻偵僗僩僢僾僐儞僨傿僔儑儞傪憲傝傑偡丅
夞楬
-
愙懕
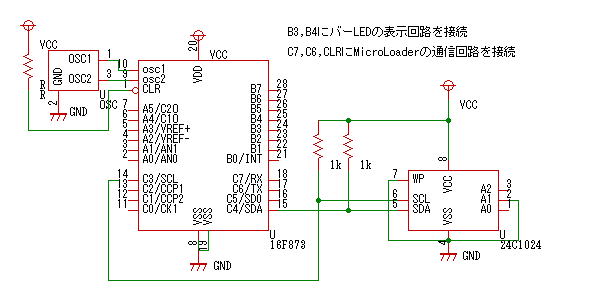
丂PIC648傪I2C偱愙懕偡傞応崌偺夞楬偼師偺傛偆偵側傝傑偡丅PIC偺RB2偲儊儌儕偺SCL(6僺儞),RB3偲儊儌儕偺SDA乮俆僺儞乯傪愙懕偟傑偡丅儊儌儕偺A2,A1,A0僺儞偼GND偵屌掕偟傑偡丅I2C偺2杮偺怣崋偼俀倠偺掞峈傪捠偟偰揹尮偵愙懕乮僾儖傾僢僾乯偡傞昁梫偑偁傝傑偡丅24C1024偺応崌丄A2,A0 僺儞偼愙懕偟偰傕堄枴偺側偄抂巕偵側傝傑偡丅
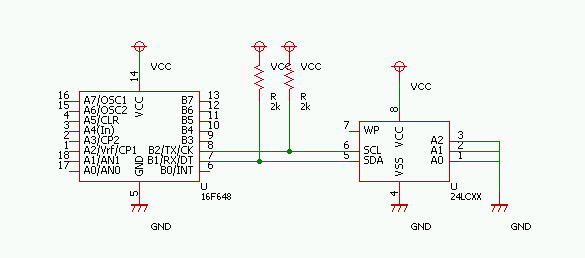
丂偙偙偱偼丄PIC俉俈俁傪梡偄偨壓恾偺夞楬偱幚尡偟傑偡丅microLoader偲僶乕LED偺愙懕夞楬偼徣棯偟偰偄傑偡丅microLoader偺夞楬偼丄僽乕僩儘乕僟傪棙梡偟偰僾儘僌儔儉傪彂偒崬傓偲偒偺傒昁梫偱偡丅寢壥偺妋擣偼僶乕LED偱峴偄傑偡丅
僾儘僌儔儈儞僌
-
I2們僾儘僌儔儉
愭摢偱i2c偺棙梡偲偦偺僺儞斣崋傪愰尵偟傑偡丅sda偲倱們倢偼僨乕僞偲僋儘僢僋怣崋偺僺儞斣崋偱偡丅force_hw 偼I2c傪僜僼僩偱側偔慻崬傒偺僴乕僪偱峴偆愰尵偱偡丅偙偺応崌丄僺儞斣崋偼曄峏偱偒傑偣傫丅
#use i2c(MASTER,sda=PIN_C4,scl=PIN_C3,force_hw)
幚嵺偺撉傒彂偒偼娭悢偱峴偄傑偡丅
void writeEXrom(int chip,long address,int data) 偱彂崬傒傪峴偄傑偡丅chip偼僠僢僾傾僪儗僗偱偡偑丄愭摢偵1010傪晅婰偡傞偨傔丄A2,A1,A0偵傛傞僠僢僾傾僪儗僗偑0偺応崌丄chip偼丂oxa0 偲偟傑偡丅懠偵彂偒崬傓address:傾僪儗僗偲 data:僨乕僞傪巜掕偟傑偡丅撉傒弌偟偼
int readEXrom(int chip,long address)
偱峴偄傑偡丅chip偲address:傾僪儗僗傪巜掕偡傞偲丄儊儌儕偺抣偑栠傝抣偲側傝傑偡丅 -
僾儘僌儔儉
偙偺僾儘僌儔儉偱偼僶僀僩扨埵偺撉傒彂偒傪峴偄傑偡丅侽斣抧偐傜弴偵0,1,2 偺抣傪彂偒崬傒丄偦偺屻丄0斣抧偐傜撉傒弌偟丄B億乕僩偵愙懕偟偨僶乕LED偱昞帵偟傑偡丅
#include <16f873A.h> #fuses HS,NOWDT,NOLVP //撪晹僋儘僢僋丄WDT,LVP側偟 #use delay(CLOCK=20000000) #use i2c(MASTER,sda=PIN_C4,scl=PIN_C3,force_hw)//use delay偺屻偵攝抲偡傞 #use fast_io(C) void writeEXrom(int chip,long address,int data); int readEXrom(int chip,long address); void dispBar(int var); int i; void main() { long ad; int data; output_float(pin_c4); output_float(pin_c3); //僶乕傪僋儕傾偡傞 output_high(PIN_B5); output_low(PIN_B5); output_low(PIN_B4); output_high(PIN_B5); delay_ms(100); for(ad=0;ad<10;ad++){ writeEXrom(0xa0,ad,(int)ad);//彂崬傒 } while(1){ for(ad=0;ad<10;ad++){ data=readEXrom(0Xa0,ad);//撉傒弌偟 dispBar(data); delay_ms(500); } } } void writeEXrom(int chip,long address,int data) { //chip偺儊儌儕偺address斣抧偵data傪彂偔 i2c_start(); i2c_write(chip); i2c_write(address>>8 ); i2c_write(address); i2c_write(data); i2c_stop(); delay_ms(10); } int readEXrom(int chip,long address) { //chip偺儊儌儕偺address傪撉傒丄偦偺抣傪曉偡 int data; i2c_start(); i2c_write(chip); i2c_write(address>>8); i2c_write(address); i2c_start(); i2c_write(chip | 0x01); data = i2c_read(0); i2c_stop(); return data; } void dispBar(int var) { // //僋儕傾偡傞 output_low(PIN_B5); output_high(PIN_B5); //ht屄揰摂偡傞 for(i=0;i<var;i++){ output_high(PIN_B4); output_low(PIN_B4); delay_us(10); } }