ソース
以下はソースです。受信用バッファと表示用バッファを分離すれば、マスタ側の遅延が少なくなります。
//I2C Slave
//Display to LCD
//SD1602:16chara * 2
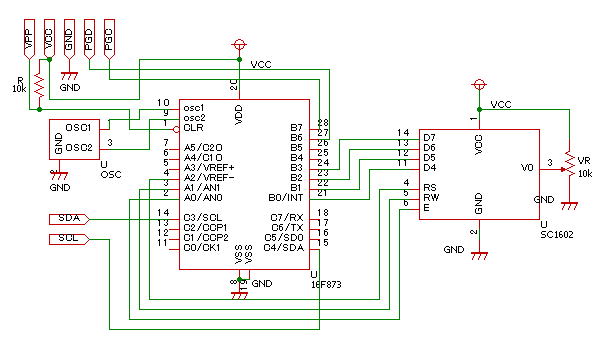
//LCD data:DB7:14> RB3,DB6:13> RB2,DB5:12> RB1,DB4:11> RB0
//LCD E:6>RA0,RW:5>RA1,RS:4>RA2,
//send address:<lcdda><1><x><y><0>
//send string :<lcdda><2><char_1>..<char_n><0>
//clear lcd:<lcdda><3><0>
//send command:<lcdda><4><command><para><0>
#include <16F873A.h>
#include <stdlib.h>
#fuses HS,NOWDT,NOLVP,NOBROWNOUT
#use delay(clock = 20000000)
//#use I2c(slave,sda=PIN_C4,scl=PIN_C3,address=0x74,no_stretch,FORCE_HW)//address must be EvenNumber
#use I2c(slave,sda=PIN_C4,scl=PIN_C3,address=0x74,no_stretch,FORCE_HW)
#define LineMax 16
//LCD connection
//#byte db = 6 // PORTB address
#define Amode 0xF0 //Aport I/O
#define rs PIN_A2 //chip select
#define rw PIN_A1 //read/write
#define stb PIN_A0 //E strobe
void outchbuf(int i);
void lcd_init();//-------- initialize
void lcd_ready();//------- busy check
void lcd_cmd(cmd);//------ send command
void lcd_data(string);//-- display string
void lcd_clear(); //------ clear display
int lcd_status(); //
int ch2;
int state,done;
int cp,lpcnt;
int alt;
int ddcm;
char chbuf[17]={2,'w','a','t','i','n','g','\0'};
#INT_SSP
void ssp_interupt (){
output_toggle(PIN_C7);
state=i2c_isr_state();
//output_high(PIN_A3);//backLight on
if(state>=0x80){//addrs match with master read
}
else if(state >0){//adrs match with master write
ch2=i2c_read();
chbuf[cp++]=ch2;
if(cp > LineMax) cp--;
if (ch2=='\0') {
//output_toggle(PIN_A3);//check
cp=0;
done=1;
}
}
}
void main (){
delay_ms(200);
cp=0;
alt=0;
done=0;
lpcnt=0;
output_low(stb);
output_low(rs);
lcd_init();//set 4bit mode
lcd_clear();
enable_interrupts(INT_SSP); //SSP割り込みを許可
enable_interrupts(GLOBAL); //全ての割り込みを許可
lcd_cmd(0x80);//1 line
lcd_data("helloo");
lcd_cmd(0xC0);//2 line
lcd_data("wait");
while (1) {
//lcd_cmd(0x80);//1 line
//lcd_data("hello");
if(done){
switch(chbuf[0]){
case 1:ddcm=0x80 + chbuf[1]-1;//firstLine
if (chbuf[2]==2) ddcm += 0x40;
lcd_cmd(ddcm);//行アドレス
break;
case 2 ://文字列
outchbuf(1);
break;
case 3:lcd_cmd(0x1);//clear
break;
case 4:lcd_cmd(chbuf[1]);
outchbuf(2);
break;
//done=0;
}
} //if
//lpcnt++;
done=0;
delay_ms(10);
}
}
void outchbuf(int i){
while(chbuf[i] != 0){
lcd_data(chbuf[i]);
i++;
}
}
//lcd command out for init
void lcd_incmd(int cmd){
//db = cmd; //mode command
output_b(cmd);
output_low(rw); //set write
output_low(rs); //set rs low
output_high(stb); //strobe
output_low(stb);
delay_us(100);
}
//initialize LCD
//set 4bit mode
void lcd_init(){
delay_ms(15);
lcd_incmd(0x30); //8bit mode set
delay_ms(5);
lcd_incmd(0x30); //8bit mode set
delay_ms(5);
lcd_incmd(0x30); //8bit mode set
delay_ms(5);
lcd_incmd(0x20); //4bit mode set
delay_ms(5);
lcd_cmd(0x2C); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0C); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
//delay_ms(2);
while(bit_test(lcd_status(),7));
}
//send data to LCD
void lcd_data(int asci){
//db = asci>>4 ; //set upper data
output_b(asci>>4);
output_low(rw); //set write
output_high(rs); //set rs high
output_high(stb); //strobe
output_low(stb);
//db = asci; //set lower data
output_b(asci);
output_high(stb); //strobe
output_low(stb);
//delay_us(50);
while(bit_test(lcd_status(),7));//check busy
}
//read status
int lcd_status(){
int high,low;
set_tris_b(Amode | 0x0F); //set input mode
output_low(rs);
output_high(rw);//read mode
output_high(stb);
//high=db & 0xF;//input A ,read upper
high=input_b()&0XF;
output_low(stb);
delay_us(10);
output_high(stb);
//low=db & 0xF; //inputA ,read lower
low=input_b()&0XF;
output_low(stb);
set_tris_b(Amode);
return(high<<4 | (low)); //return status
}
//send command
void lcd_cmd(int cmd){
//db = cmd>>4 ; //set upper data & set PA4=0
output_b(cmd>>4 );
output_low(rw); //set write
output_low(rs); //set rs low
output_high(stb); //strobe
output_low(stb);
//db = cmd; //set lower data
output_b(cmd );
output_high(stb); //strobe
output_low(stb);
while(bit_test(lcd_status(),7));
}
// clear display clear function
void lcd_clear(){
lcd_cmd(1); //initialize command
//delay_ms(10);
lcd_cmd(2);
while(bit_test(lcd_status(),7));
}
マスタプログラム
参考のためマスタのテストプログラムをのせます。タイマー1の割り込みで約1秒単位でtmを計数します。表示はmain()で200mS単位で行います。基本クロックが88の内部クロックのため、正確ではありません。
LCDで数字を表示する場合、桁数指定をして文字数を合わせないと、前の表示が残ってしまいます。また、intは符号なし1バイト整数ですから、表示フォーマットは
%u になります。2バイト整数の場合 %ld です。コマンド間には数m秒の遅延が必要です。
一般に main() の初期化部ではクライアントの立ち上がる時間を待ち合わせる必要があります。LCD では 300mS程度が必要で、100mS
では初期表示画面でフリーズすることがあります。
//////////////////////////////////////////////////
// I2Cマスターテストプログラム //
//LCD制御
//I2Cデバイスアドレスは0x74
//コマンド
//send address:<lcdda><1><x><y><0>
//send string :<lcdda><2><char_1>..<char_n><0>
//clear lcd:<lcdda><3><0>
//send command:<lcdda><4><command><para><0>
//マスタの回路は、C4,C3をI2C接続
//ポートB、A0 をLED表示(動作確認用)
#include <16f873a.h>
#include <stdlib.h>
//#include <string.h>
#fuses HS,NOWDT,NOPROTECT,NOLVP,NOBROWNOUT
#use delay(clock = 20000000)
#use i2c(MASTER,sda=PIN_C4,scl=PIN_C3,FORCE_HW)
//メイン関数/////////////////////////////////////////
#define lcddva 0x74
int i,val;
int tm,num;
int32 loopcnt;
char moji1[]="Hai:";
char moji2[]="num :";
char numbuf[6];
char lbuf[15];
void main(){
val=0;
tm=0;
loopcnt=0;
//set_tris_c(0x99); //RB 7-4:IN 3-0:OUT
output_float(PIN_C3); //I2C pin float
output_float(PIN_C4); //I2C pin float
//Cポートに出力する場合、set_tris_c()が必要
delay_ms(300); //wait for Client up
i2c_start(); //clear
i2c_write(lcddva);
i2c_write(3);
i2c_write(0);
i2c_stop();
delay_ms(50);
while(1){
output_toggle(PIN_A0);//動作確認
i2c_start(); //clear
i2c_write(lcddva);
i2c_write(3);
i2c_write(0);
i2c_stop();
delay_ms(100);
//-----------------------------------
itoa(loopcnt,10,numbuf);
strcpy(lbuf,moji1);
strcat(lbuf,numbuf);
i2c_start();
i2c_write(lcddva);
i2c_write(1);//コマンド
i2c_write(4);//x
i2c_write(1);//y
i2c_write(0);
i2c_stop();
delay_ms(10);
itoa(loopcnt,10,numbuf);
strcpy(lbuf,moji2);
strcat(lbuf,numbuf);
i2c_start();
i2c_write(lcddva);
i2c_write(2 );
for(i=0;i<=strlen(lbuf);i++){
i2c_write(lbuf[i] );
//delay_ms(1);
}
//i2c_write(0);
i2c_stop();
delay_ms(20);
//------------------------------------
i2c_start();
i2c_write(lcddva);
i2c_write(1);//コマンド
i2c_write(2);//x
i2c_write(2);//y
i2c_write(0);;
i2c_stop();
delay_ms(10);
i2c_start();
i2c_write(lcddva);
i2c_write(2 );
for(i=0;i<=strlen(lbuf);i++){
i2c_write(lbuf[i] );
//delay_ms(1);
}
i2c_stop();
delay_ms(20);
//------------------------------------
i2c_start();
i2c_write(lcddva);
i2c_write(1);//コマンド
i2c_write(12);//x
i2c_write(2);//y
i2c_write(0);;
i2c_stop();
delay_ms(10);
i2c_start();
i2c_write(lcddva);
i2c_write(2 );
for(i=0;i<=strlen(moji1);i++){
i2c_write(moji1[i] );
}
i2c_stop();
delay_ms(10);
loopcnt++;
delay_ms(400);
}
}